VIDETEC-2
Im Projekt VIDETEC-2 wurden anwendungsnahe Verkehrsdaten mittels innovativer Sensor- und Ortungstechnologien erhoben mit dem Ziel die Sicherheit und Mobilität im Straßenverkehr zu erhöhen. Eine frühzeitige Gefahreneinschätzung von kritischen Situationen schützt insbesondere vulnerable Verkehrsteilnehmer. Innovative KI-Algorithmen zur Erfassung der Verkehrslage wurden implementiert und an einem Verkehrsknotenpunkt in München-Garching installiert. Das Projekt endete am 31. Dezember 2025.
The VIDETEC-2 project used innovative sensor and location technologies to collect application-oriented traffic data in order to increase road safety and mobility. Early risk assessment of critical situations protects vulnerable road users in particular. Innovative AI algorithms for recording the traffic situation have been implemented and installed at a traffic crossing in Munich-Garching. The project was finished in December 2025.
Project Partners and Links:
Coordinator: IMST GmbH
DLR e.V.: VIDETEC-2 @ DLR
TU München: VIDETEC-2 @ TU-Munich
FH Dortmund: VIDETEC-2 @ FH-Dortmund
CGF: CGF AG
Funding: Federal Ministry for Digital and Transport: VIDETEC-2 @ BMDV
Project's Internet Site: VIDETEC-2
Gemeinsam für mehr Sicherheit im Straßenverkehr
In Hinblick auf den hochautomatisierten und vernetzten Straßenverkehr der Zukunft, haben es sich die Projektpartner zur Aufgabe gemacht, neue Technologien zur Erfassung von nicht-digitalen Verkehrsteilnehmern zu untersuchen. Ziel ist es, dass diese auch in hochkomplexen Umgebungen wie urbanen Straßenkreuzungen zuverlässig von autonomen und vernetzten Fahrzeugen erkannt werden. Hierbei liegt der Fokus besonders auf ungeschützten Verkehrsteilnehmern wie Fußgängern oder Fahrradfahrern. Im Rahmen dieses Vorhabens wurden Messkampagnen an einer Testkreuzung in München-Garching über einen längeren Zeitraum durchgeführt, bei dem verschiedene Verkehrsszenarien aufgezeichnet und die Daten zur späteren Klassifizierung verwendet wurden.
Zu diesem Zweck setzt die IMST GmbH eine 77 GHz Radartechnologie ein, mit deren Messungen Personen, sowie Fahrzeuge in Entfernung und Richtung bestimmt werden können. Darüber hinaus nehmen die Radargeräte auch das sogenannte "Mikrodoppler-Signale" auf, mit welchem später mithilfe Künstlicher Intelligenz (KI) und Neuronaler Netze (NN) Zieleklassen bestimmt wurden. Erkennt das System beispielsweise einen LKW, der sich einem Radfahrer nähert, kann daraus gefolgert werden, dass eine für den vulnerablen Verkehrsteilnehmer potentielle Gefahrensituation entstehen kann. Damit bestünde die Möglichkeit, diese Personen beispielsweise durch Lichtsignale oder über Car-to-X Kommunikation zu warnen.
Im Verlauf des Projektes wurden 5 Messkampagnen an einer Kreuzung in München-Garching durchgeführt. Dabei wurden bis zu 5 Radarmodule von Typ sR77-3403e an zwei verschiedenen Messbrücken installiert. Diese sind bereits Kameras der TU-München ausgerüstet, so dass zeitsynchrone Radar- und Videodaten aufgezeichnet werden konnten, mit denen im Anschluss an die Messungen die KI trainiert und verifiziert werden konnte. Die KI-Aufgabe übernahm Projektpartner Hochschule Dortmund. Im Rahmen des Projektes fanden die folgenden Events statt:
- Juli 2023: erste Installationen und Testmessungen an Messbrücke 110
- Juni 2024: Fixe Installationen und Testmessungen an Messbrücke 110
- Februar 2025: Wintermesskampage und Messungen bei Dunkeheit
- Mai 2025: Sommermesskampagne an Messbrücken 110 und 120
- Oktober 2025: Finale Demonstration
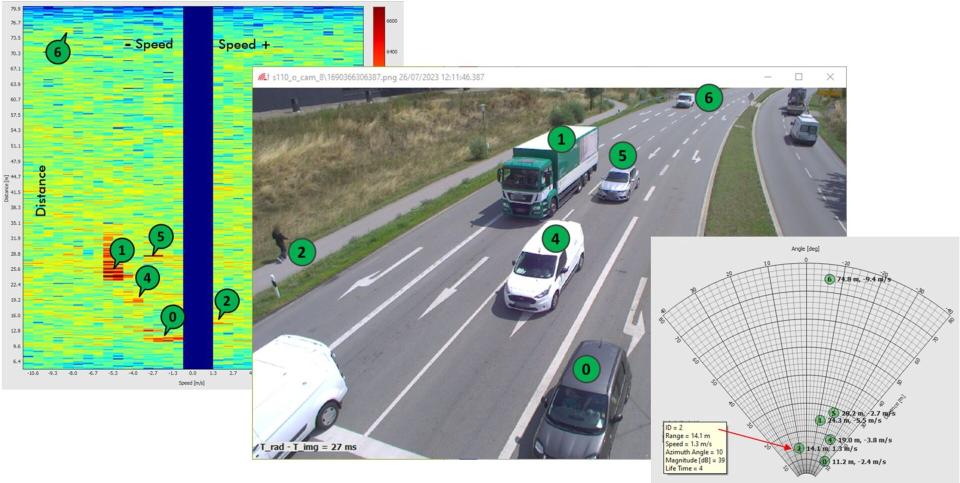
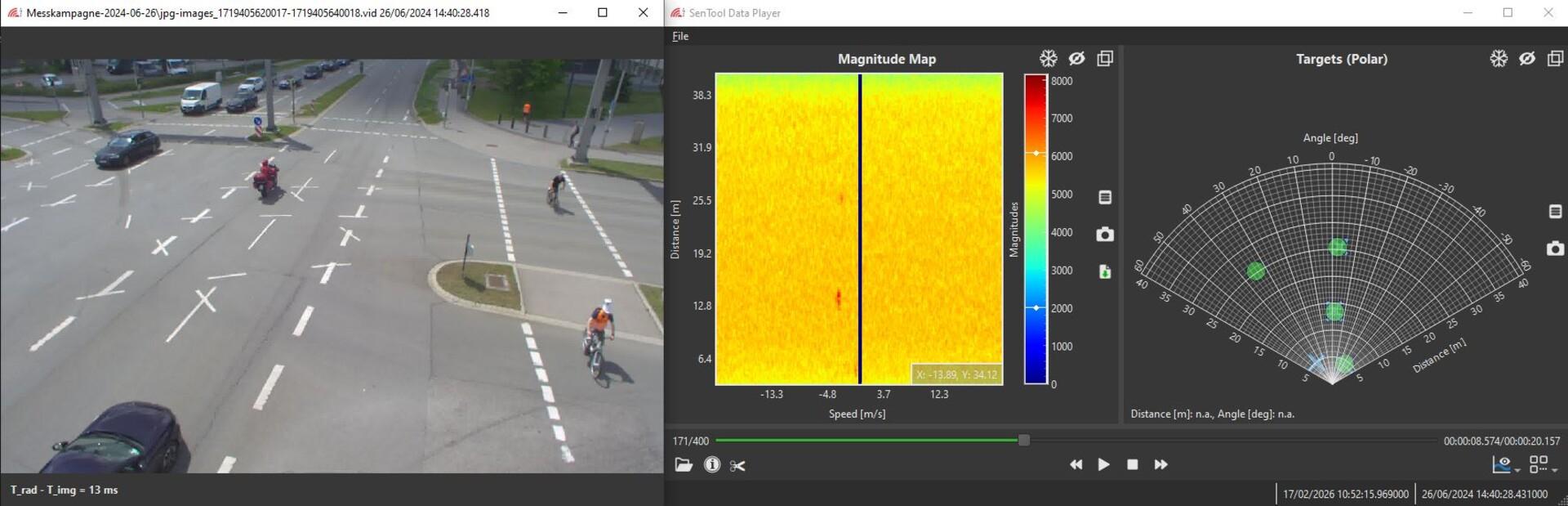
Die Grafiken unten zeigen die Messkreuzung mit den Messbrücken 110 und 120 mit den installierten Kameras und Radarsensoren. Die Pfeile weisen in die jeweilige Blickrichtung der Sensoren. Auf den Fotos sind Momentaufnahmen der Verkehrsszenarien zu sehen. Mit den Radarsensoren wurden die Verkehrsteilnehmer gemessen. Zu den Messdaten gehören Entfernung, Richtung (Winkel), Gescheindigkeit, Reflektionsparamter, Zeitstempel und Mikro-Doppler-Daten, die für die Klassifizierung der Radarziele mittels KI herangezogen werden. Die gemessenen Radardaten stehen in einem binären Datenformat zur Verfügung. Die aufgezeichneten Daten können mit Hilfe des Programms "DataPlayer" von IMST eingelesen und abgespielt werden. Sobald Videosequenzen mit den Zeitstempeln der Daten übereinstimmen, werde diese ebenfalls angezeigt. Ausschnitte aus dem DataPlayer sind unten dargestellt. Zum einen werden die Tracking-Daten in Entfernung, Richtung und Zieleigenschaften geplottet. Zum anderen ist die Range-Doppler-Map (RDM) abgebildet, die die Entfernung über der Geschwindigkeit darstellt. Eine negative Geschwindigkeit bedeutet, dass sich das Ziel auf den Radarsensor zubewegt. Bei einer positiven Geschwindigkeit entfernt sich das Ziel. Die Projektpartner stellen relevante Daten über die Mobilithek des Bundesministeriums für Verkehr (BMV) zur Verfügung. Links zu den Radardaten von IMST und weiterer Daten der Projektpartner sind weiter unten zu finden.
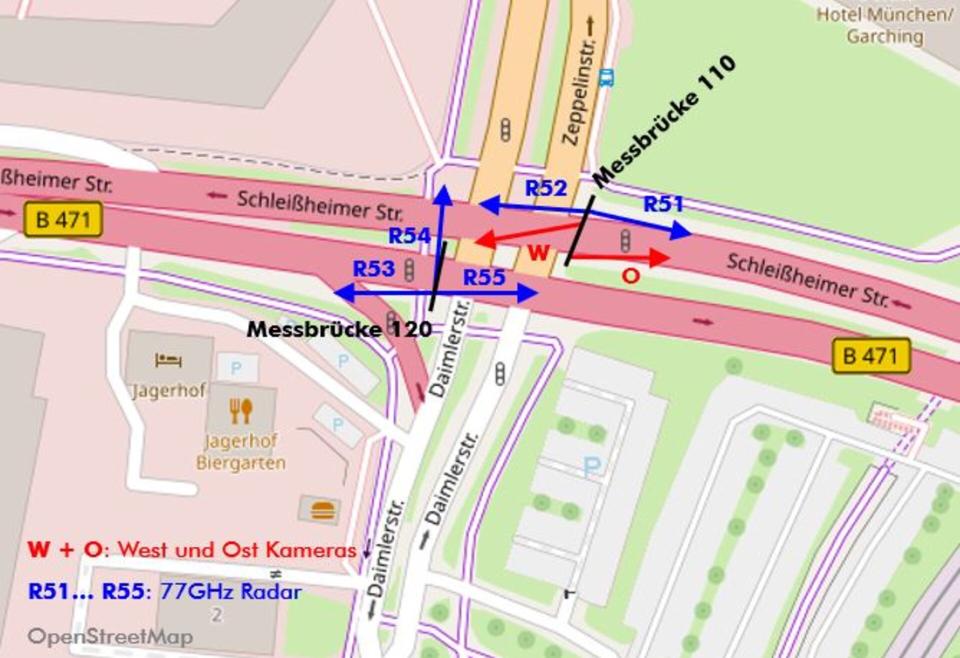
Crossing in Munich-Garching with Radar and Video Installations for Traffic Surveillance
Measurement Camgaign in Munich-Garching in July 2023 at Providentia++ Test Field (Radar R51 and Camera O)

Measurement Bridge 110 with Radar R51 and R52 and View of Camera W (West)
Video: Radar R52 Measurements with Range-Dopper-Map (RDM) and Target Tracking (Freigabe Video bis 31.12.26)
Zu den Messkampagnen im Projekt VIDETEC-2 können diese Daten heruntergeladen werden:
- SenTool-DataPlayer V2.0.2 und Radar Streaming Data Format
- Juni 2024: Radardaten (*.bin) und Videodaten (*.vid)
- Link zur mobilithek: Mikro-Doppler Radardaten von Verkehrsteilnehmern
- Weitere Radardaten können auf Anfrage zur Verfügung gestellt werden
- Verfügbare Daten der Projektpartner auf zenodo
(Freigabe über IMST-Cloud bis 31.12.2026)


Veröffentlichung gemeinsamer Ergebnisse aus dem Forschungsprojekt VIDETEC-2:
F. de Ponte Müller, M. Aghiad Raslan, M. Liu, Ch. Oikonomopoulos, M. Schmidhammer, I. Rashdan, B. Merk, R. Kulke, L. Strand, V. Lakshminarasimhan, T. Uhlich, A. Becker, St. Sand, A. Knoll:
"A Multi-Modal UWB-Radar-Camera Dataset for Vulnerable-Road-User Sensing at Urban Intersections"
VTC2026-Spring: Vehicular Technology Conference, Nice, France 9, - 12 June 2026
Veröffentlichung gemeinsamer Ergebnisse aus dem Forschungsprojekt VIDETEC:
R. Kulke, M. Hägelen, R. Jetten, M. Schmidhammer, F. de Ponte Müller, I. Rashdan:
"Increased traffic safety by means of intelligent detection and localization technologies",
European Microwave Week 2021, EuMW, EuRAD, London, 6. April 2022

Are you interested in our research or looking for a project partner?
Our team is looking forward to working with you!